Nei sistemi robotici multiasse, la precisione di posizionamento, la ripetibilità e la reattività dinamica dell'effettore finale non sono determinate solo dalla sofisticazione dell'algoritmo di controllo. Sono fondamentalmente vincolati dalla larghezza di banda meccanica, dalle caratteristiche del gioco e dalla densità di coppia dei singoli attuatori articolari che compongono la catena cinematica. Un robot articolato a sei assi con precisione inferiore al millimetro dell'effettore finale richiede che ciascun giunto fornisca una risoluzione di posizionamento angolare nell'intervallo dei secondi d'arco, con rigidità torsionale che impedisce la deflessione sotto i momenti indotti dal carico utile.
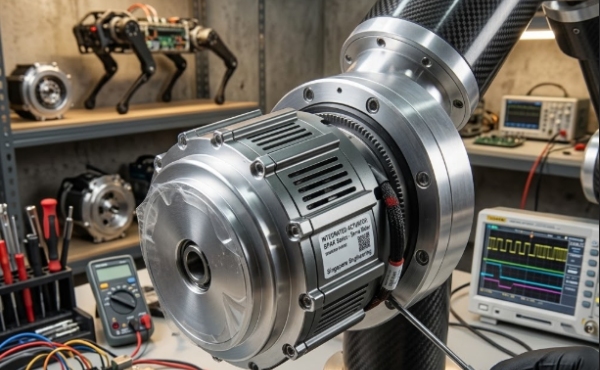
L' attuatore motore congiunto robot: ND-A5215-10 di iHF Group rappresenta una soluzione appositamente progettata per questo livello di vincolo. Invece di assemblare servomotori, riduttori ed encoder generici in una configurazione congiunta, iHF Group ha integrato questi sottosistemi in un modulo attuatore unificato ottimizzato specificamente per le dinamiche meccaniche, termiche e di controllo dell'articolazione robotica.
Architettura Elettromeccanica Integrata
Topologia del motore torque senza telaio
I tradizionali progetti di giunti robotici utilizzano servomotori alloggiati accoppiati a riduttori epicicloidali o armonici tramite accoppiamenti meccanici. Questo assemblaggio introduce errori di allineamento, gioco di accoppiamento e maggiore lunghezza assiale che compromettono la compattezza del giunto e la risposta dinamica.
L'ND-A5215-10 utilizza un'architettura del motore torque senza telaio in cui il rotore è direttamente integrato nell'albero di uscita del giunto e lo statore nell'alloggiamento del giunto. Questa eliminazione dell'alloggiamento separato del motore e delle interfacce di accoppiamento riduce la lunghezza del giunto del 30-40% rispetto ai gruppi convenzionali, consentendo rapporti carico utile/peso più elevati e ingombri del robot più compatti. Il motore torque a trasmissione diretta eroga una coppia continua di 15 Nm con una capacità di picco di 45 Nm, fornendo l'elevata densità di coppia a basse velocità richiesta dall'articolazione del giunto robotico senza le perdite di efficienza e il gioco della riduzione a ingranaggi multistadio.
Riduzione di precisione dell'azionamento armonico
Sebbene i motori torque senza telaio forniscano un'eccellente densità di coppia, le velocità di uscita richieste per i tipici profili di movimento dei giunti dei robot (tipicamente 30-120 giri/min) richiedono una riduzione della velocità. L'ND-A5215-10 integra un riduttore armonico con rapporto di trasmissione 100:1, ottenendo una riduzione a stadio singolo con caratteristiche di gioco zero che i sistemi planetari o cicloidali non possono replicare.
La tecnologia Harmonic Drive utilizza una scanalatura flessibile deformata da un generatore di onde contro una scanalatura circolare, creando un impegno simultaneo di più denti che distribuisce il carico sul 30% dei denti disponibili. Questa geometria di innesto garantisce una ripetibilità posizionale di ±10 secondi d'arco e una rigidità torsionale superiore a 20.000 Nm/rad, specifiche che si traducono direttamente nella precisione dell'effettore finale nelle configurazioni multiasse.
La produzione di attuatori motore con giunto robotico di precisione del Gruppo iHF convalida i componenti di trasmissione armonica attraverso la misurazione del profilo della forma del dente flexspline, della geometria del foro della scanalatura circolare e del runout del cuscinetto del generatore di onde. L'assemblaggio incorpora protocolli di precarico che ottimizzano i modelli di contatto della mesh senza indurre uno stress eccessivo sulla flexspline che comprometterebbe la durata a fatica.
Architettura di feedback con doppio encoder assoluto
Il controllo della posizione nei giunti robotici richiede feedback in due punti distinti: posizione del rotore del motore per la commutazione e il controllo della corrente vettoriale e posizione dell'albero di uscita per la chiusura del circuito servo a livello di giunto. L'ND-A5215-10 integra doppi encoder assoluti: un encoder multigiro a 23 bit sul rotore del motore e un encoder monogiro a 19 bit sull'uscita dell'azionamento armonico.
Questa configurazione a doppio encoder consente strategie di controllo avanzate: compensazione dell'ondulazione della coppia tramite feedforward della posizione del motore, compensazione del gioco tramite feedback della posizione dell'uscita e rilevamento delle collisioni tramite stima istantanea della coppia dalla corrente del motore e dalla derivata di posizione. La codifica assoluta elimina le sequenze di homing all'accensione, riducendo i tempi di avvio del robot e consentendo il ripristino sicuro del funzionamento dopo arresti di emergenza.

Gestione termica e prestazioni in servizio continuo
Ingegneria del percorso termico
I motori torque senza telaio generano perdite resistive (I²R) negli avvolgimenti dello statore che devono essere dissipate per prevenire il degrado dell'isolamento e la smagnetizzazione dei magneti del rotore in terre rare. Nelle configurazioni di giunti compatti in cui il motore è incorporato nell'alloggiamento del giunto, il raffreddamento ad aria convenzionale non è pratico.
L'ND-A5215-10 utilizza un circuito di raffreddamento a liquido integrato nell'alloggiamento del giunto, con passaggi del refrigerante ricavati nella struttura in lega di alluminio che entrano direttamente in contatto con il pacco di laminazione dello statore. Questo design raggiunge una resistenza termica dall'avvolgimento al refrigerante di 0,15 K/W, consentendo il funzionamento continuo alla coppia nominale con temperature di ingresso del refrigerante fino a 35°C. Per le applicazioni senza disponibilità di refrigerante per l'impianto, iHF Group offre una variante raffreddata ad aria termicamente ottimizzata con geometria delle alette estesa e convezione forzata interna.
Modellazione e protezione termica
iHF Group fornisce modelli termici calibrati su specifici profili di movimento dei robot, consentendo ai clienti di prevedere l'aumento della temperatura degli avvolgimenti in base ai cicli di lavoro previsti. I sensori di temperatura integrati (RTD PT1000 incorporati nelle spire dell'avvolgimento) forniscono un monitoraggio termico in tempo reale con protezione da sovratemperatura che riduce il comando corrente prima che vengano raggiunte le soglie di danno.
Integrazione meccanica e standardizzazione dell'interfaccia
Architettura ad albero cavo
L'ND-A5215-10 è dotato di un foro passante centrale di 15 mm di diametro, che consente il passaggio di cavi di alimentazione, cablaggio di segnale, linee pneumatiche o fibre ottiche attraverso il centro del giunto anziché instradarli esternamente. Questo design ad albero cavo elimina la complessità della gestione dei cavi nei robot multiasse, riduce i rischi di intoppi durante il movimento e mantiene la geometria esterna pulita per applicazioni robotiche collaborative in cui è prevista la vicinanza umana.
Compatibilità dell'interfaccia di montaggio
iHF Group standardizza le interfacce meccaniche ND-A5215-10 secondo i modelli di flangia ISO 9409-1, consentendo l'integrazione diretta con bracci robotici disponibili in commercio senza la realizzazione di adattatori personalizzati. L'albero di uscita incorpora un'interfaccia con chiavetta o scanalata con capacità di trasmissione della coppia superiore all'uscita di picco dell'attuatore, prevenendo guasti all'interfaccia in condizioni di stallo o collisione.


Integrazione del sistema di controllo
Protocollo di comunicazione EtherCAT
L'ND-A5215-10 integra l'elettronica del servoazionamento con la comunicazione bus di campo EtherCAT, consentendo tempi di ciclo di 1 ms per gli aggiornamenti dei comandi di posizione e 125 μs per la chiusura dell'anello di coppia. Questa larghezza di banda di comunicazione supporta algoritmi avanzati di controllo del movimento: controllo dell'impedenza per la limitazione della forza del robot collaborativo, soppressione delle vibrazioni attraverso il feedback dell'accelerazione a livello articolare e manutenzione predittiva attraverso l'andamento dei parametri del motore.
Integrazione delle funzioni di sicurezza
La sicurezza funzionale conforme a SIL 3 / PL e è ottenuta attraverso il monitoraggio della posizione ridondante (doppio encoder con confronto incrociato), circuiti Safe Torque Off (STO) con interblocchi hardware e controllo sicuro del freno per assi caricati per gravità. iHF Group fornisce la documentazione di sicurezza, inclusa l'analisi FMEDA e i rapporti sui test di iniezione dei guasti per supportare i processi di marcatura CE e di certificazione della sicurezza funzionale dei clienti.
Domini applicativi
Robotica collaborativa
L'involucro compatto dell'ND-A5215-10, la bassa inerzia riflessa e le capacità di controllo sensibile alla forza lo rendono adatto per giunti di robot collaborativi in cui l'interazione uomo-robot richiede sicurezza intrinseca attraverso il monitoraggio della coppia e della posizione piuttosto che una protezione esterna. L'elevata retroguidabilità dell'azionamento armonico consente un movimento cedevole quando vengono applicate forze esterne, con il sistema di controllo che rileva forze di contatto inferiori a 150 N sull'effettore finale.
Robotica chirurgica e medica
Le applicazioni dei robot medici richiedono compatibilità con la sterilizzazione, compatibilità elettromagnetica per gli ambienti delle sale operatorie e precisione di posizionamento per la manipolazione dei tessuti. iHF Group offre ND-A5215-10 con finiture superficiali di grado medico, lubrificanti biocompatibili e gruppi di cavi schermati che soddisfano i requisiti di compatibilità elettromagnetica IEC 60601-1.
Produzione di semiconduttori ed elettronica
La compatibilità con le camere bianche (Classe ISO 3), la generazione minima di particolato e il funzionamento privo di vibrazioni sono essenziali nella gestione dei wafer e nell'assemblaggio dei componenti elettronici. L'azionamento armonico chiuso e il motore senza telaio dell'ND-A5215-10 eliminano i detriti dovuti all'usura delle spazzole, mentre il bilanciamento di precisione e il precarico dei cuscinetti riducono al minimo la trasmissione delle vibrazioni alle sensibili apparecchiature di processo.
Domande frequenti
D: Qual è la capacità massima di carico utile quando si utilizza l'ND-A5215-10 in una configurazione di robot a sei assi?
R: La capacità di carico dipende dalla lunghezza del braccio, dai profili di accelerazione e dal ciclo di lavoro, non solo dalla coppia dell'attuatore. Per un tipico robot a sei assi con portata di 800 mm con ND-A5215-10 sui giunti 2, 3 e 4 e attuatori più piccoli sui giunti del polso, il carico utile massimo è di circa 10-15 kg con accelerazione di 1 g con ciclo di lavoro del 50%. iHF Group fornisce strumenti di simulazione cinematica per ottimizzare la selezione dell'attuatore per geometrie robot specifiche e requisiti di movimento.
D: L'ND-A5215-10 può funzionare senza raffreddamento a liquido in ambienti fino a 40°C?
R: La variante raffreddata ad aria mantiene la coppia continua nominale fino a 35°C ambiente con convezione naturale e fino a 40°C con declassamento all'80% della coppia nominale. Per un funzionamento prolungato a temperature superiori a 40°C o in installazioni confinate con flusso d'aria limitato, si consiglia il raffreddamento a liquido. Il servizio di simulazione termica di iHF Group è in grado di prevedere le prestazioni per condizioni di installazione specifiche.
D: Quale intervallo di manutenzione è consigliato per il riduttore Harmonic Drive?
R: In condizioni operative normali (coppia nominale, carico d'urto moderato, lubrificazione adeguata), il flexspline Harmonic Drive presenta una durata a fatica superiore a 10.000 ore di funzionamento. Il Gruppo iHF consiglia l'ispezione annuale delle condizioni dei cuscinetti di uscita tramite l'analisi delle vibrazioni e la sostituzione del lubrificante ogni 5.000 ore di funzionamento o 2 anni, a seconda di quale evento si verifichi per primo. Le funzioni integrate di monitoraggio delle condizioni possono estendere questi intervalli attraverso algoritmi di manutenzione predittiva.
D: L'ND-A5215-10 è compatibile con servocontrollori di terze parti?
R: L'ND-A5215-10 è ottimizzato per l'integrazione con il servoazionamento integrato di iHF Group, ma i parametri del motore (resistenza di fase, induttanza, costante EMF posteriore, protocolli encoder) sono documentati per supportare l'integrazione di controller di terze parti. I clienti devono verificare la larghezza di banda del loop di corrente e la compatibilità dell'algoritmo di commutazione con il team di ingegneri dell'applicazione di iHF Group prima di specificare controller non integrati.
D: Qual è la specifica del gioco e in che modo influisce sulla ripetibilità del robot?
R: Il riduttore Harmonic Drive ottiene un gioco pari a zero grazie alla sua geometria di maglia elastica. L'isteresi misurata sull'albero di uscita è tipicamente ±3 secondi d'arco in condizioni di assenza di carico. Nelle applicazioni pratiche dei robot, la conformità strutturale e la risoluzione dell'encoder dominano la ripetibilità piuttosto che il gioco degli ingranaggi, con l'ND-A5215-10 che contribuisce per meno del 5% all'errore totale di ripetibilità del sistema in catene cinematiche ben progettate.

 EN
EN en
en vi
vi it
it es
es th
th tr
tr ja
ja pt
pt ko
ko ru
ru fr
fr de
de ar
ar Richiedi un preventivo
Richiedi un preventivo 









