▌Parte I: L'Attuatore come Sistema Nervoso del Robot
Ogni movimento robotico, dalla manipolazione chirurgica a livello di micron allo smistamento logistico ad alta velocità, ha origine nell'attuatore articolare. Tuttavia, la scelta degli attuatori viene spesso trattata come un compito di approvvigionamento piuttosto che come un problema ingegneristico a livello di sistema.
In realtà, l'attuatore del motore di un giunto robotico deve gestire contemporaneamente l'ondulazione della coppia, il comportamento termico, la latenza dell'encoder, le armoniche dell'ingranaggio e la stabilità a circuito chiuso. Qualsiasi debolezza in un parametro si propaga attraverso l'intera catena cinematica, compromettendo precisione e ripetibilità.
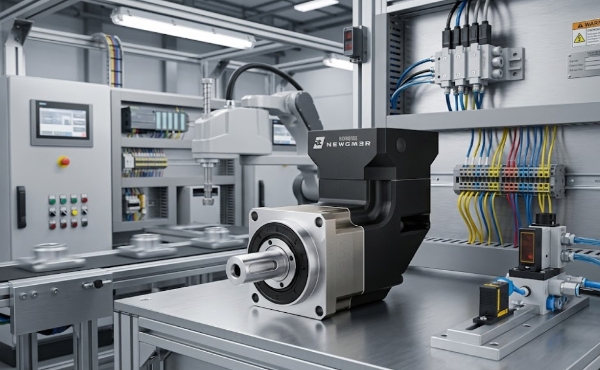
L' attuatore motore congiunto per robot ND-A5216-10 sviluppato da iHF Group risolve questo problema integrando motore, riduttore epicicloidale e feedback a doppio encoder in un sistema unificato co-progettato anziché componenti discreti. Ciò elimina le perdite di interfaccia e migliora la coerenza dinamica in tutti i regimi operativi.

▌Parte II: Analisi tecnica dell'ND-A5216-10
2.1 Progettazione elettromagnetica: soppressione della coppia di cogging
Una sfida chiave nel movimento di precisione è la coppia di cogging, causata dall’interazione rotore-statore. Produce ondulazioni della velocità a bassa velocità, oscillazioni posizionali e rumore acustico.
L'ND-A5216-10 mitiga questo problema grazie alla geometria della fessura ottimizzata e al design del rotore magnetico inclinato. L'ottimizzazione degli elementi finiti garantisce un'erogazione di coppia uniforme anche al di sotto di 100 giri/min, un intervallo critico per assemblaggi di precisione, controllo della forza e operazioni di inserimento delicate.
2.2 Riduzione dell'ingranaggio planetario: gioco <3 minuti d'arco
L'attuatore integra un riduttore epicicloidale elicoidale ad alta precisione con gioco inferiore a 3 minuti d'arco (0,05°). Su un braccio da 1 metro, ciò corrisponde a una deviazione della punta <0,87 mm dal solo gioco degli ingranaggi.
Gli ingranaggi elicoidali forniscono un innesto progressivo, offrendo:
● Densità di coppia più elevata rispetto agli ingranaggi cilindrici
● Ridotta trasmissione delle vibrazioni
● Minori emissioni acustiche per ambienti sicuri per l'uomo
Rispetto ai sistemi a sperone, la riduzione planetaria elicoidale migliora la scorrevolezza e la distribuzione del carico, migliorando la stabilità strutturale e la risposta dinamica.
2.3 Architettura a doppio encoder
A differenza dei sistemi a encoder singolo che deducono il movimento in uscita attraverso i rapporti di trasmissione, l'ND-A5216-10 utilizza encoder doppi:
● Encoder lato motore per la commutazione e il controllo della velocità
● Encoder sul lato uscita per la posizione effettiva dell'albero
Ciò elimina gli errori cumulativi dovuti al gioco, alla cedevolezza torsionale e all'espansione termica. Consente inoltre la diagnostica in tempo reale confrontando la deviazione della posizione del motore e dell'uscita, consentendo il rilevamento precoce dell'usura meccanica.
2.4 Controllo unificato a circuito chiuso
L'attuatore supporta la regolazione simultanea di coppia, velocità e posizione attraverso circuiti di controllo in cascata:
● Anello di coppia: larghezza di banda 1–5 kHz
● Anello di velocità: 200–500 Hz
● Anello di posizione: 50–200 Hz
La dinamica inversa feedforward compensa l'inerzia e gli effetti non lineari, riducendo l'errore di tracciamento durante l'accelerazione rapida. Ciò consente il passaggio continuo dal movimento ad alta velocità al controllo della forza conforme senza transizioni di modalità.

▌Parte III: Prestazioni dinamiche e termiche
3.1 Rapida inversione di direzione
Il tempo di ciclo nella robotica è spesso dominato dalla decelerazione e dall’inversione piuttosto che dalla velocità di picco. L'ND-A5216-10 riduce il ritardo di inversione attraverso:
● Bassa inerzia del rotore
● Larghezza di banda del loop di corrente elevata
● Cedevolezza meccanica controllata nel treno di ingranaggi
Ciò riduce al minimo le oscillazioni e migliora la produttività nei sistemi pick-and-place, saldatura e ispezione.
3.2 Gestione termica
La stabilità termica è fondamentale nel funzionamento continuo. L'aumento della temperatura aumenta la resistenza, riduce la costante di coppia e accelera l'invecchiamento dell'isolamento.
L'attuatore risolve questo problema tramite:
● Design dello statore con elevato fattore di riempimento del rame
● Materiali per impregnazione termicamente conduttivi
● Alloggiamento in alluminio scanalato per una migliore convezione
Queste caratteristiche riducono il declassamento e mantengono stabile la coppia erogata nel funzionamento 24 ore su 24, 7 giorni su 7.
▌Parte IV: Domini applicativi
4.1 Produzione di precisione
Nel microassemblaggio e nella produzione elettronica, i requisiti di precisione raggiungono ±0,02–0,05 mm. L'ND-A5216-10 consente tutto ciò grazie al gioco ridotto, al doppio feedback e all'erogazione di coppia uniforme. È particolarmente efficace nelle articolazioni del polso di bracci robotici multiasse per compiti di orientamento preciso.
4.2 Robotica collaborativa
I cobot devono rispettare i limiti di forza ISO/TS 15066 mantenendo la produttività. Il basso attrito dell'attuatore, la risposta rapida della coppia e il design a basso rumore consentono un'interazione umana sicura. Gli ingranaggi elicoidali riducono l'emissione acustica, migliorando l'usabilità del posto di lavoro.
4.3 Automazione logistica
Negli AGV e nei sistemi di smistamento l’adattabilità è essenziale. Il controllo in modalità coppia consente la gestione di carichi utili diversi, da oggetti fragili a pacchi pesanti, senza modifiche hardware. L'accelerazione e la decelerazione rapide migliorano direttamente l'efficienza della produttività.
4.4 Sistemi di ispezione e di laboratorio
La metrologia e l'ispezione dei semiconduttori richiedono ambienti a bassissime vibrazioni. Il bilanciamento del rotore dell'attuatore e l'innesto fluido degli ingranaggi riducono al minimo la trasmissione delle vibrazioni, garantendo stabilità di misurazione nelle apparecchiature sensibili adiacenti.
▌Parte V: Filosofia ingegneristica del Gruppo iHF
Nel Gruppo iHF, lo sviluppo degli attuatori segue una filosofia di co-progettazione a livello di sistema:
● Ottimizzazione della densità di coppia nei domini elettromagnetico, termico e meccanico
● Simulazione multifisica per eliminare precocemente cogging e saturazione
● Controllo delle vibrazioni a livello di sistema che integra attuatore e struttura
● Design meccanico sensibile al controllo per una migliore risposta dinamica
● Convalida della durabilità basata su IEC 60068 per l'affidabilità industriale
L'ND-A5216-10 non è un componente autonomo ma parte di un sistema di movimento co-ottimizzato progettato per ambienti di produzione intelligenti.
▌Parte VI: Contesto di mercato
Il mercato degli attuatori per robotica è in rapida espansione grazie a:
● Automazione Industria 4.0 e sistemi di produzione flessibili
● Crescita della robotica collaborativa in ambienti umani condivisi
● Miniaturizzazione di macchinari industriali
● Richiesta di una maggiore densità di coppia in spazi compatti
In questo contesto, gli attuatori integrati come ND-A5216-10 riducono la complessità del sistema combinando motore, cambio e rilevamento in un'unica architettura, accelerando i cicli di sviluppo OEM e migliorando l'affidabilità.
❓ Domande frequenti
Q1: In che modo ND-A5216-10 è diverso dai sistemi motore + riduttore?
Integra motore, riduttore epicicloidale e doppi encoder in un sistema co-progettato, eliminando gli errori di allineamento e migliorando la precisione a circuito chiuso.
Q2: Qual è la sua prestazione di gioco?
Inferiore a 3 minuti d'arco, corrispondente a un errore di posizionamento submillimetrico sui bracci robotici lunghi.
Q3: Perché doppi encoder?
Eliminano gli errori di inferenza misurando direttamente la posizione di uscita, migliorando la precisione della traiettoria e consentendo la manutenzione predittiva.
Q4: Il controllo della coppia è supportato?
SÌ. L'attuatore supporta il controllo di coppia, velocità e posizione in tempo reale con una risposta a larghezza di banda elevata adatta per applicazioni sensibili alla forza.
Q5: È adatto ai cobot?
SÌ. Il basso rumore, il controllo della coppia conforme e la risposta rapida lo rendono adatto agli ambienti di collaborazione uomo-robot.
Q6: Quali vantaggi offre nei sistemi logistici?
Il controllo adattivo della coppia consente la gestione di carichi utili misti con massa e fragilità variabili senza modifiche hardware.
D7: Quale supporto fornisce iHF Group?
Modelli CAD, dati sulla velocità di coppia, analisi termica e supporto tecnico a livello di applicazione per l'integrazione OEM.

 EN
EN en
en vi
vi it
it es
es th
th tr
tr ja
ja pt
pt ko
ko ru
ru fr
fr de
de ar
ar Richiedi un preventivo
Richiedi un preventivo